Toggle Dropdown
ГОСТ Р ИСО 13373-2-2009
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Контроль состояния и диагностика машин
ВИБРАЦИОННЫЙ КОНТРОЛЬ СОСТОЯНИЯ МАШИН
Часть 2 Обработка, анализ и представление результатов измерений вибрации
Condition monitoring and diagnostics of machines. Vibration condition monitoring.
Part 2. Processing, analysis and presentation of vibration data
Цели и принципы стандартизации в Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом регулировании», а правила применения национальных стандартов Российской Федерации - ГОСТ Р 1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
1 ПОДГОТОВЛЕН Автономной некоммерческой организацией «Научно-исследовательский центр контроля и диагностики технических систем» (АНО «НИЦ КД») на основе собственного аутентичного перевода на русском языке стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по стандартизации ТК 183 «Вибрация, удар и контроль технического состояния»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом Федерального агентства по техническому регулированию и метрологии от 15 декабря 2009 г. № 858-ст
4 Настоящий стандарт является идентичным по отношению к международному стандарту ИСО 13373-2:2005 «Контроль состояния и диагностика машин. Вибрационный контроль состояния машин. Часть 2. Обработка, анализ и представление результатов измерений вибрации» (ISО 13373-2:2005 «Condition monitoring and diagnostics of machines - Vibration condition monitoring - Part 2: Processing, analysis and presentation of vibration data»).
При применении настоящего стандарта рекомендуется использовать вместо ссылочных международных стандартов соответствующие им национальные и межгосударственные стандарты, сведения о которых приведены в дополнительном приложении ДА
Измерения вибрации в широкой полосе частот позволяют получить общую оценку вибрационного состояния машины, а отслеживание изменений параметров широкополосной вибрации - сформировать сигнал, предупреждающий обслуживающий персонал машины об изменении ее технического состояния. Обработка и анализ сигналов вибрации в соответствии с методами, установленными настоящим стандартом, позволяют пользователю выявить возможные причины изменений технического состояния и наблюдать за их развитием.
Достоинством контроля состояния по сигналам вибрации является не только возможность получения информации о предполагаемом отказе машины к определенному моменту времени и планирования мер по предотвращению этого отказа, но также поступление ценной информации для последующего планирования и выполнения операций по техническому обслуживанию. Анализ вибрации позволяет выявить такие характерные неисправности машины, как нарушение в сопряжениях кинематических пар, дисбаланс, ускоренный износ, нестабильность потока, дефекты смазки.
Общее руководство по вибрационному контролю состояния машин установлено ИСО 13373-1 [8 ]. В настоящем стандарте приведены рекомендации по обработке, анализу и представлению данных, полученных в процессе вибрационного контроля состояния, которые могут быть использованы для углубленного диагностирования причин появления неисправностей.
Обработка сигналов, их анализ и методы диагностирования могут различаться в зависимости от контролируемых технологических процессов, необходимой точности диагноза, имеющихся ресурсов и т.п. Правильно спланированная и внедренная система мониторинга учитывает влияние многих факторов, таких как приоритетность выполняемой машиной операции, критичность и сложность технологической системы, потери от простоя, вероятности отказов разных видов и наличие диагностических признаков зарождающихся неисправностей.
Выбор данных, необходимых для контроля состояния машины, требует проведения соответствующего анализа.
Специалист в области вибрационного анализа должен собрать максимальное количество значимой информации о контролируемой машине. Например, знание резонансных и возбуждаемых частот машины позволяет определить ожидаемые частотные составляющие в спектре вибрации и диапазон частот анализа. Знание вибрационного состояния машины при ее вводе в эксплуатацию, истории машины, режимов работы также может быть использовано специалистом в процессе анализа.
Проведение предварительного анализа при построении системы мониторинга позволяет правильно выбрать типы датчиков, определить места их установки, способы формирования сигналов, методы их обработки и установить критерии оценки состояния.
Настоящий стандарт устанавливает методы обработки и представления результатов измерений вибрации, анализа вибрационных характеристик в целях вибрационного контроля состояния машин вращательного действия и их диагностирования. Рассмотрены методы фильтрации и анализа сигналов при исследовании характерных типов динамического поведения машины. Многие из установленных методов могут быть распространены и на машины других видов, включая машины возвратно-поступательного действия. Приведены примеры представления параметров, которые обычно используют для оценки технического состояния машин и ее диагностирования.
В настоящем стандарте рассмотрены два основных подхода к анализу вибрации: в частотной и временной областях. Рассмотрены также возможности уточнения диагноза посредством изменения режима работы машины.
Настоящий стандарт распространяется на методы вибрационного контроля состояния машин, нашедшие широкое практическое применение. Существует много других методов исследования поведения машины посредством углубленного анализа вибрации и диагностирования, выходящие за пределы обычных процедур мониторинга. Эти методы не описаны в настоящем стандарте, но некоторые из них указаны (для сведения) в разделе 5 .
Руководства по использованию результатов измерений широкополосной вибрации для машин разных классов и размеров установлены в международных стандартах серий ИСО 7919 [4 ] и ИСО 10816 [5 ], а также в других документах (например, [11 ], [12 ]), где приведена дополнительная информация в отношении специфических неисправностей, которые могут быть обнаружены методами вибрационной диагностики.
В настоящем стандарте использована нормативная ссылка на следующий стандарт:
ИСО 1683, Акустика. Рекомендуемые опорные значения при определении уровней шума (ISO 1683, Acoustics - Preferred reference quantities for acoustic levels)
Вибрационные измерения осуществляют с помощью датчиков, производящих аналоговый электрический сигнал, пропорциональный мгновенному значению ускорения, скорости или перемещения. Сигнал может быть записан для последующего анализа или отображен, например, на осциллографе. Для получения действительного значения измеряемого параметра вибрации выходное напряжение умножают на коэффициент преобразования измерительной цепи, включающей датчик, усилитель и устройство записи. Наиболее распространен анализ вибрации в частотной области, но часто полезным является представление сигнала как функции времени.
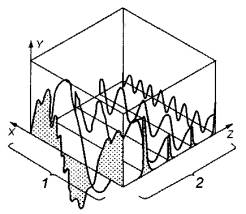 X - время; Y - значение сигнала (амплитуда); Z - частота; 1 - осциллограмма во временной области; 2 - спектр в частотной области X - время; Y - значение сигнала (амплитуда); Z - частота; 1 - осциллограмма во временной области; 2 - спектр в частотной области
Рисунок 1 - Представление сигнала во временной и частотной областях | 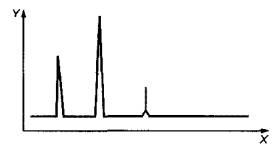 X - время; Y - значение сигнала X - время; Y - значение сигнала
Рисунок 2 - Форма сложного сигнала |
На рисунке 1 показано одновременное представление сигнала во временной и частотной областях. В данном примере сигнал является суперпозицией четырех составляющих. Суммарный временной сигнал, наблюдаемый на экране анализатора, выделен на рисунке темным цветом. Посредством преобразования Фурье анализатор выделяет из исходного временного сигнала четыре частотные компоненты.
На рисунке 2 показан аналогичный пример сложного сигнала с датчика вибрации, наблюдаемый на экране анализатора. В данном случае сигнал образован тремя составляющими, показанными на рисунке 3, с частотами, показанными на рисунке 4.
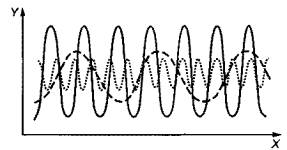 X - время; Y - значение сигнала X - время; Y - значение сигнала
Рисунок 3 - Временные составляющие сложного сигнала | 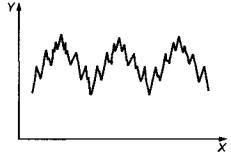 X - частота; Y - значение сигнала X - частота; Y - значение сигнала
Рисунок 4 - Частотные составляющие сложного сигнала |
Часто соотношения между параметрами вибрации в разных точках конструкции или в разных направлениях не менее важны, чем сам сигнал вибрации. По этой причине на практике используют многоканальные анализаторы сигналов с функциями сопоставления сигналов по двум каналам. Для проведения подобного анализа важно иметь информацию об амплитудных и фазовых соотношениях в сопоставляемых сигналах.
3.2 Аналоговые и цифровые системы
Аналоговый сигнал с датчика может быть обработан с помощью как аналоговой, так и цифровой системы. Обычно аналоговые системы включают в себя фильтры, усилители, записывающие устройства, интеграторы и другие устройства, которые преобразуют сигнал без изменения его аналоговой природы. Однако в последнее время все более очевидными становятся преимущества цифровой обработки сигналов. Аналого-цифровой преобразователь (АЦП) осуществляет многократные выборки аналогового сигнала и преобразует их в последовательности чисел. После этого для выполнения операций фильтрации, интегрирования, вычисления спектра (см. 4.3.2 ), построения гистограмм и др. используют стандартные компьютерные программы. Оцифрованный сигнал также может быть отображен как функция времени. При правильном выборе частоты дискретизации цифровой сигнал будет содержать в себе ту же исходную информацию, что и аналоговый.
При любом способе обработки сигнала необходимо знать коэффициент преобразования измерительной цепи (отношение напряжения сигнала на выходе к истинному значению измеряемого параметра). Анализируемый сигнал должен существенно превышать уровень фонового шума, но не быть чрезмерным, чтобы не допускать его искажения в измерительной цепи (например, в результате клиппирования).
Наиболее важными параметрами, характеризующими процесс оцифровки аналогового сигнала, являются частота дискретизации и разрешение. Важно убедиться, что в сигнале не содержатся частотные составляющие на частоте выше половинной частоты дискретизации. В противном случае форма оцифрованного временного сигнала будет искажена, а при реализации процедуры быстрого преобразования Фурье (БПФ) в спектре вибрации вследствие эффекта наложения спектров появятся ложные составляющие (см. 4.3.7 ). Частота дискретизации зависит от вида выполняемого анализа и ожидаемого частотного состава сигнала. Если целью является построение временной функции сигнала, то рекомендуется, чтобы частота дискретизации примерно в 10 раз превышала максимальную частоту сигнала. Если анализ проводят в частотной области, то для реализации процедуры БПФ необходимо, чтобы частота дискретизации была в два раза выше максимальной частоты сигнала. Для защиты от наложения спектров используют фильтр нижних частот, подавляющий высокочастотный шум или другие высокочастотные составляющие с частотами выше половины частоты дискретизации. Разрядность АЦП должна быть достаточной для представления оцифрованного сигнала с требуемой точностью.
3.3 Предварительное формирование сигнала
Вибрационные сигналы с датчиков до их передачи на устройства записи обычно должны пройти еще ряд устройств для достижения необходимого уровня электрического напряжения, подавления шумов и других нежелательных сигналов. Устройства предварительного формирования сигналов включают в себя источник питания датчика вибрации, предусилитель, усилитель, интегратор и фильтры разных видов. Фильтрация сигналов рассмотрена в 3.4 .
3.3.2 Интегрирование и дифференцирование
Вибрация может быть выражена через величины перемещения, скорости или ускорения. Обычно выбор предпочтительной величины обусловлен диапазоном частот анализа (в низкочастотной области выше уровень сигнала перемещения, а в высокочастотной - сигнала ускорения) или применяемым критерием оценки вибрации. Преобразование одной величины в другую может быть осуществлено посредством операций интегрирования и дифференцирования. Интегрирование ускорения по времени позволяет получить сигнал скорости, а интегрирование сигнала скорости - перемещение. Двойное интегрирование ускорения позволяет получить сигнал перемещения непосредственно, без промежуточных операций. Дифференцирование является операцией, обратной интегрированию.
Для гармонических сигналов справедливы следующие математические соотношения между перемещением х , скоростью v и ускорением а :
 (1)
(1)
 (2)
(2)
 (3)
(3)













